Robotics
Tipsy
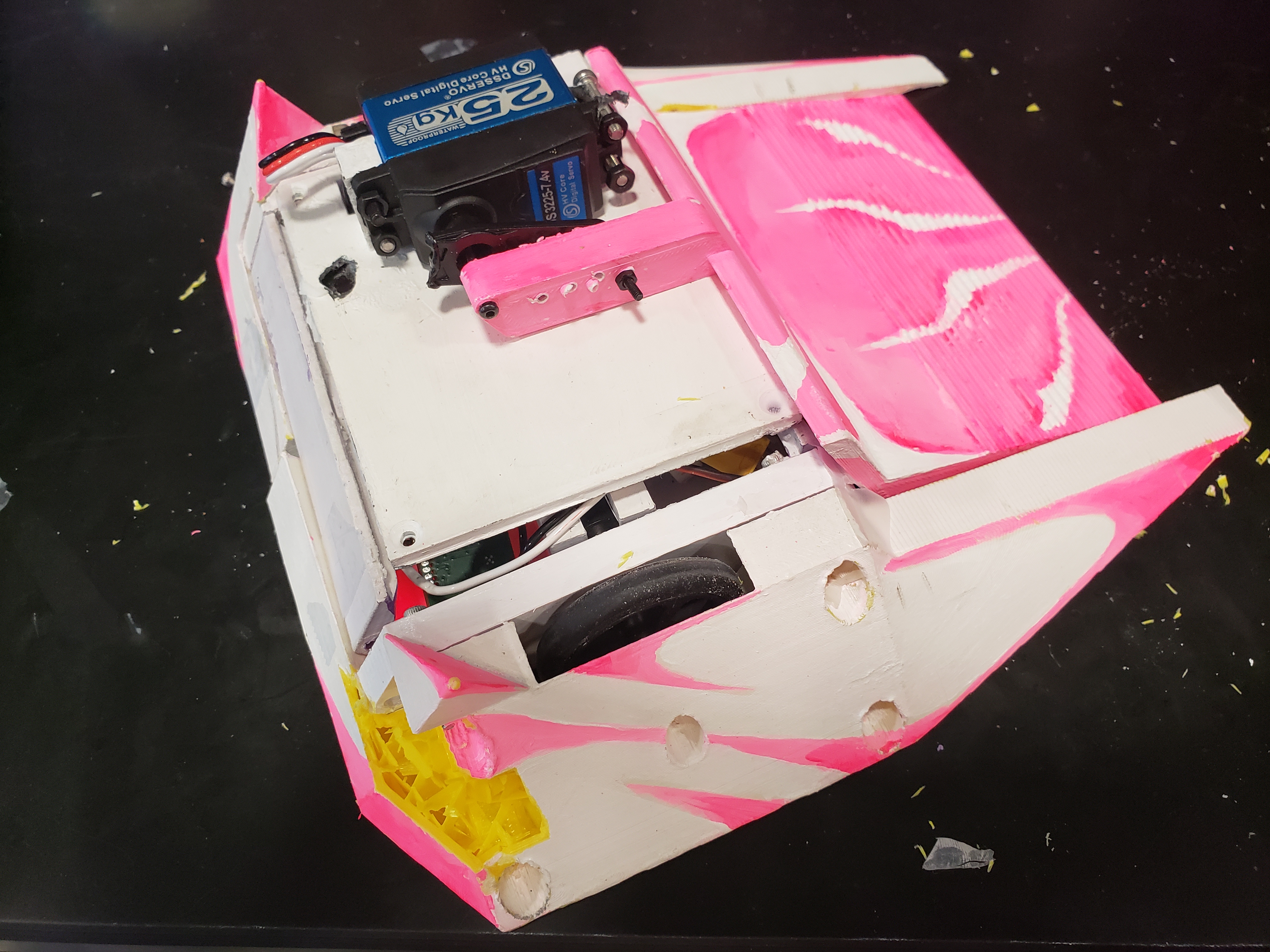
“Tipsy” is the name of the one-pound antweight flipper robot that I’m currently working on with Maya Cheshire, also a student at the University of Illinois. It uses a 35kg servo for lifting purposes, along with a pair of Repeat Robotics Brushed MK2s for driving and a Malenki Nano HV to put everything together. We designed the robot in Fusion and printed it with PLA filament. There are many characteristics of Tipsy that we optimized when CADing; for example, all four sides are chamfered and low to the ground to deflect hits and make sure that we don’t get karmic revenge in the form of someone flipping us over. We also implemented a dustpan-shaped flipper attachment to give the robot a wide catchment area, actuating the whole setup with a double-pivot mounted linkage.
Competitions so far have been interesting but overall very fun. We’ve gone to too many of them to count, and our experiences have ranged from barely being able to keep the top plate on the robot at our first competition to placing in the top 3 at our latest one, WCCRL December 2025. Winning aside, it has been a tremendous learning experience for both of us. For example, we’ve realized the importance of having an accessible switch mount on the top plate of the robot to turn it on and also the power of using captive nuts instead of heat inserts to more securely hold the robot together.
I also have a second robot in the works. It’s pretty low-key right now, but the goal is to make the world’s first meltybrain combat robot without a dedicated microprocessor for translation. Stay tuned!